移動機器人(AGV)是工業機器人的一種。它由計算機控制,具有移動、自動導航、多傳感器控制、網絡交互等功能,在實際生產中最主要的用途是搬運,可以說只要有搬運需求的地方,就有移動機器人的應用可能。
近年來,移動機器人技術在世界范圍內得到快速發展。人們致力于把移動機器人應用于各種場景中,從室內外搬運機器人,到服務型機器人,再到工業機器人等,移動機器人的運用都得到了巨大突破。
在移動機器人研究中一個最關鍵的技術就是即時定位和建圖,也就是所謂的SLAM技術。SLAM它試圖解決這樣的問題:一個機器人在未知的環境中運動,如何通過對環境的觀測確定自身的運動軌跡,同時構建出環境的地圖。
SLAM技術正是為了實現這個目標涉及到的諸多技術的總和。由于其重要的理論與應用價值,被很多學者認為是實現真正全自主移動機器人的關鍵。
按照核心的功能模塊來區分,目前常見的移動機器人SLAM系統一般具有兩種形式:基于激光雷達的SLAM(激光SLAM)和基于視覺的SLAM(Visual SLAM或VSLAM)。
那么激光SLAM與視覺SLAM到底有何不同呢?看下面這個表格就一目了然啦~
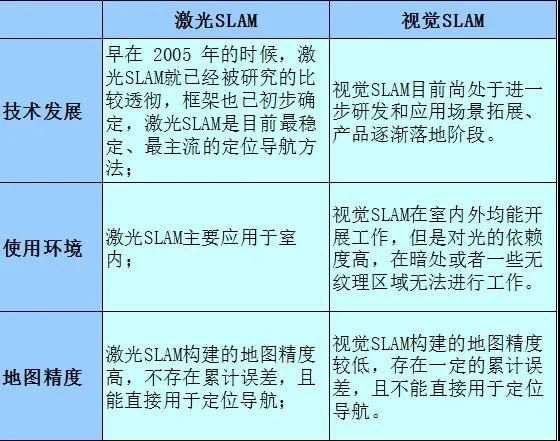
激光SLAM與視覺SLAM比較
通過對比我們發現,激光SLAM和視覺SLAM各擅勝場。兩者相較,激光 SLAM 構建的地圖精度高,不存在累計誤差,且能直接用于定位導航。
當然,激光SLAM也有一定的局限性。比如在又長又直、兩側是墻壁的長廊或是動態變化大的環境中,單純依靠激光SLAM容易發生定位丟失的情況。

其實,要想讓移動機器人應對各種復雜的使用場景,激光SLAM與視覺SLAM必將在相互競爭和融合中發展,多傳感器融合導航必然是未來發展方向。伴隨移動機器人核心技術的解決,將替代人工完成簡單、重復、勞動量大的繁雜工作,真正為人類服務。